

Robô Articulado: desenvolvido para aplicações industriais que requeiram Alta Flexibilidade.
Os Robôs Articulados da Delta, Série DRV, com controlador de robô série DCV, facilitam integração perfeita com outros dispositivos periféricos da Delta para estabelecer estações de trabalho robotizadas altamente integradas que permitem excelente eficiência de produção e, além disto, permitem reduzir os custos de mão de obra.
Com excelente flexibilidade, os Robôs Articulados de 6 eixos têm duas faixas de trabalho diferentes para atender a uma ampla variedade de demandas de aplicações. Os robôs podem ser amplamente utilizados em indústrias como como eletrônica, elétrica, processamento de metal, borracha e plásticos, bem como em várias aplicações, incluindo inspeção, montagem, distribuição de cola, manutenção de máquinas, embalagem, solda e carga/descarga. A Série DRV da Delta é sua melhor parceira para atingir o conceito para a Indústria 4.0.
Características:
Modelos DRV70L e DRV90L
O Robô ARTICULADO da Delta é apresentado em dois modelos: o DRV70L e o DRV90L. Ambos modelos tem um Payload de 7Kg e a diferença entre estes dois modelos é o alcance máximo de trabalho (“maximum working range”), sendo que no primeiro é de 710mm e no segundo de 900mm.
Benefícios:
Módulo Controlador do Robô
O Controlador do Robô Articulado Delta, conhecido como Série DCV, fornece eixos de extensão para controle de movimento através de servo-drives, módulos DI/O e conexão de dispositivos periféricos via DMCNET, rede de alta velocidade para comunicação em tempo real da Delta, para atender a todos os tipos de aplicações industriais. Além disso, o DCV também suporta a interface MODBUS/TCP para conectar dispositivos periféricos, incluindo sistemas de visão de máquina, sensores, controladores de host e computadores para um sistema de automação robótico completo.
Periféricos do Robô Articulado Delta
O módulo controlador do robô pode ser integrado com unidades de servo controle periféricos, com sistemas de visão, módulos de I/O remotos e interface de operação e programação “Teach Pendant”. A figura mostra um esquema da combinação dos periféricos da interface do controlador DCV.
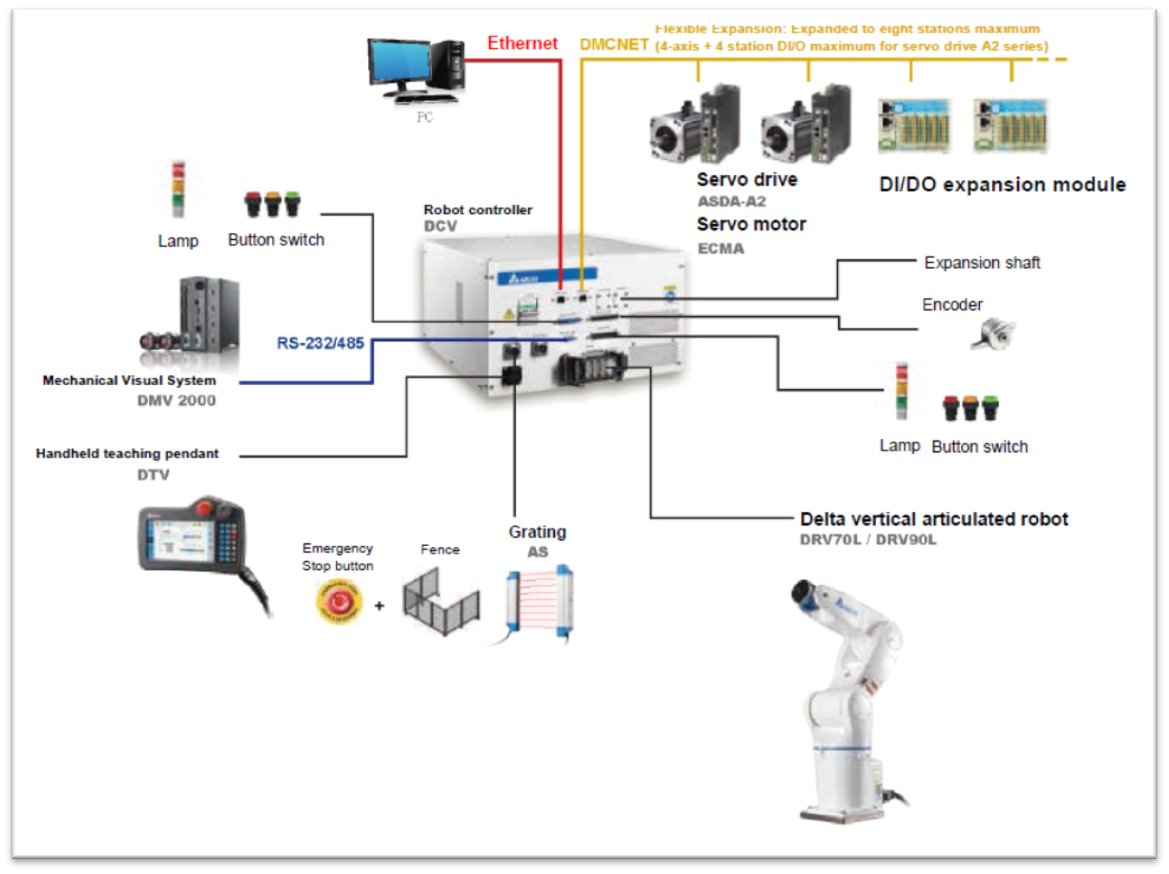
Arquitetura típica do Robô Articulado Delta com conexão do Controlador com dispositivos periféricos
Programação do Robô SCARA: Múltiplos Métodos
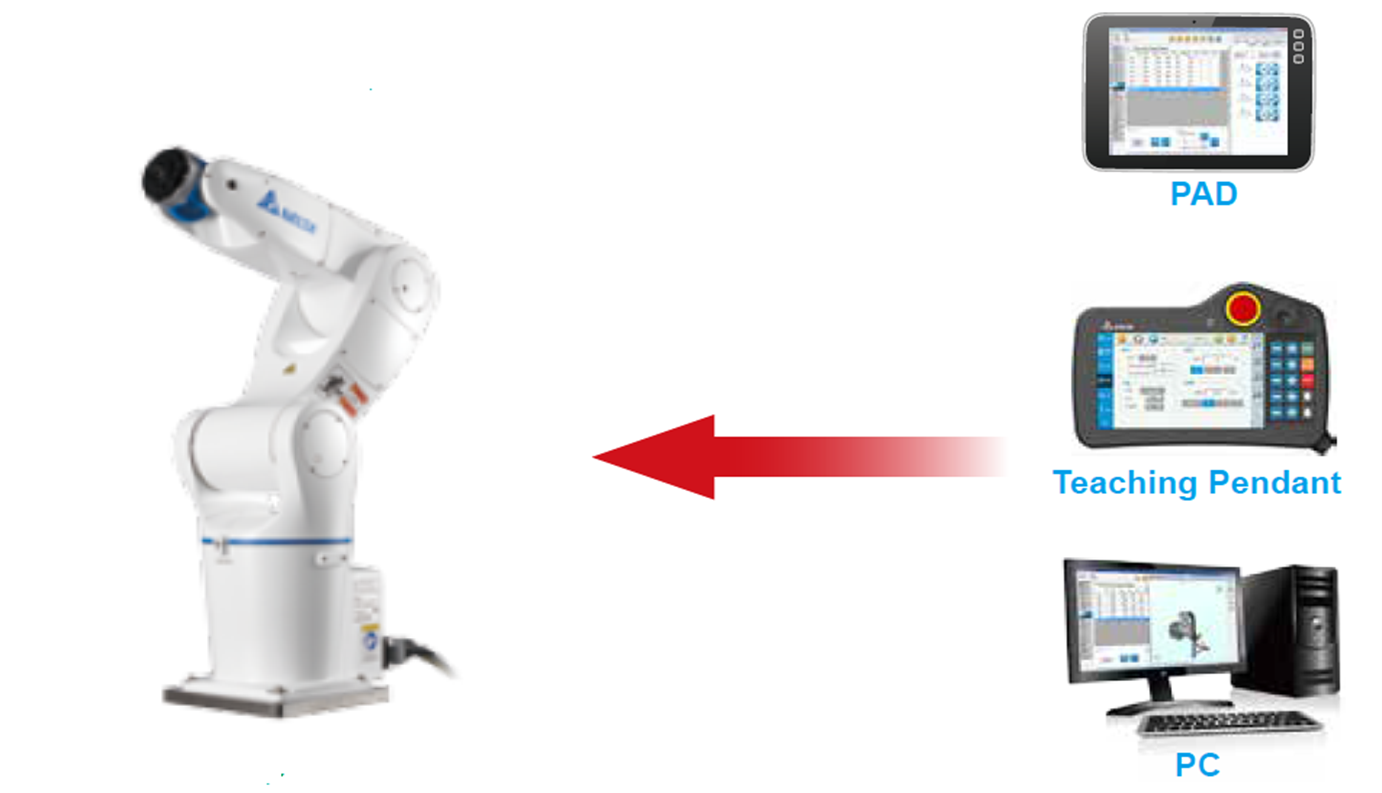
A programação do Robô SCARA pode ser feita através de diferentes métodos: Notebook, “Teach Pendant” ou um PAD.
Software de Programação: DRAStudio
DRAStudio é um software para integração robótica, ou seja, possui várias funcionalidades para programação do robô, com linguagens de programação simples e intuitiva, Além disto, possibilita a manutenção do robô através da monitoração em tempo real das suas operações.
Handhel Teach Pendant
A programação de um robô com instruções manuais pode ser trabalhoso e requerer muito tempo para depurar o programa. Além disso, é difícil atingir 100 por cento precisão de movimento no espaço 3D. Um método de programação de Robôs é utilizar um dispositivo portátil chamado “Handheld Teach Pendant”, ou Interface Homem Máquina para Robô. O “Handheld Teach Pendant” permite ao operador mover o robô através de uma variedade de movimentos. Quando uma sequência foi totalmente especificada, o robô pode operar a programação a toda velocidade.

Aplicações:
Módulo Controlador do Robô
O Controlador do Robô Articulado Delta, conhecido como Série DCV, fornece eixos de extensão para controle de movimento através de servo-drives, módulos DI/O e conexão de dispositivos periféricos via DMCNET, rede de alta velocidade para comunicação em tempo real da Delta, para atender a todos os tipos de aplicações industriais. Além disso, o DCV também suporta a interface MODBUS/TCP para conectar dispositivos periféricos, incluindo sistemas de visão de máquina, sensores, controladores de host e computadores para um sistema de automação robótico completo.
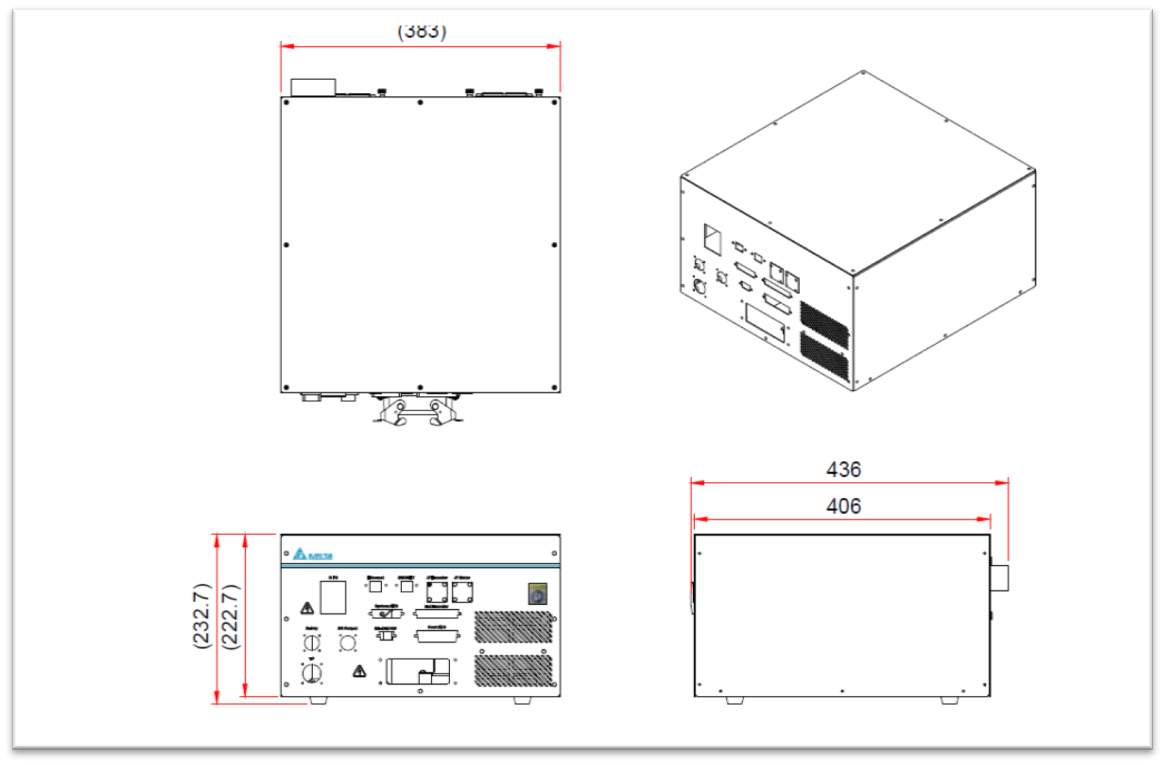
Série DCV – Controlador do Robô Articulado Delta
Periféricos do Robô Articulado Delta
O módulo controlador do robô pode ser integrado com unidades de servo controle periféricos, com sistemas de visão, módulos de I/O remotos e interface de operação e programação “Teach Pendant”. A figura mostra um esquema da combinação dos periféricos da interface do controlador DCV.
Arquitetura típica do Robô Articulado Delta com conexão do Controlador com dispositivos periféricos
Programação do Robô SCARA: Múltiplos Métodos
A programação do Robô SCARA pode ser feita através de diferentes métodos: Notebook, “Teach Pendant” ou um PAD.
Software de Programação: DRAStudio
DRAStudio é um software para integração robótica, ou seja, possui várias funcionalidades para programação do robô, com linguagens de programação simples e intuitiva, Além disto, possibilita a manutenção do robô através da monitoração em tempo real das suas operações.
Handhel Teach Pendant
A programação de um robô com instruções manuais pode ser trabalhoso e requerer muito tempo para depurar o programa. Além disso, é difícil atingir 100 por cento precisão de movimento no espaço 3D. Um método de programação de Robôs é utilizar um dispositivo portátil chamado “Handheld Teach Pendant”, ou Interface Homem Máquina para Robô. O “Handheld Teach Pendant” permite ao operador mover o robô através de uma variedade de movimentos. Quando uma sequência foi totalmente especificada, o robô pode operar a programação a toda velocidade.